The fundamental challenges of mobile networks stem from their defining characteristics when compared to other networks: mobility. Traditionally, mobility was a property of only one end of the network, end user devices such as mobile phones and laptop computers. Todays celluar networks, consist of a *static* access point that wirelessly conect is mobile users to the operators network and ultimately the internet. The placement of these acces points is carefully deliberated and researched through a long, and often expensive, manual process of measuring the signal environment from potential sites. The inheirent downside of this approach is that once the optimal placement of the cell tower has been established, and the radio equipment deployed, it’s stuck. Unable to move, the network operator has to rely on other methods to respond to dynamic changes in the environment.
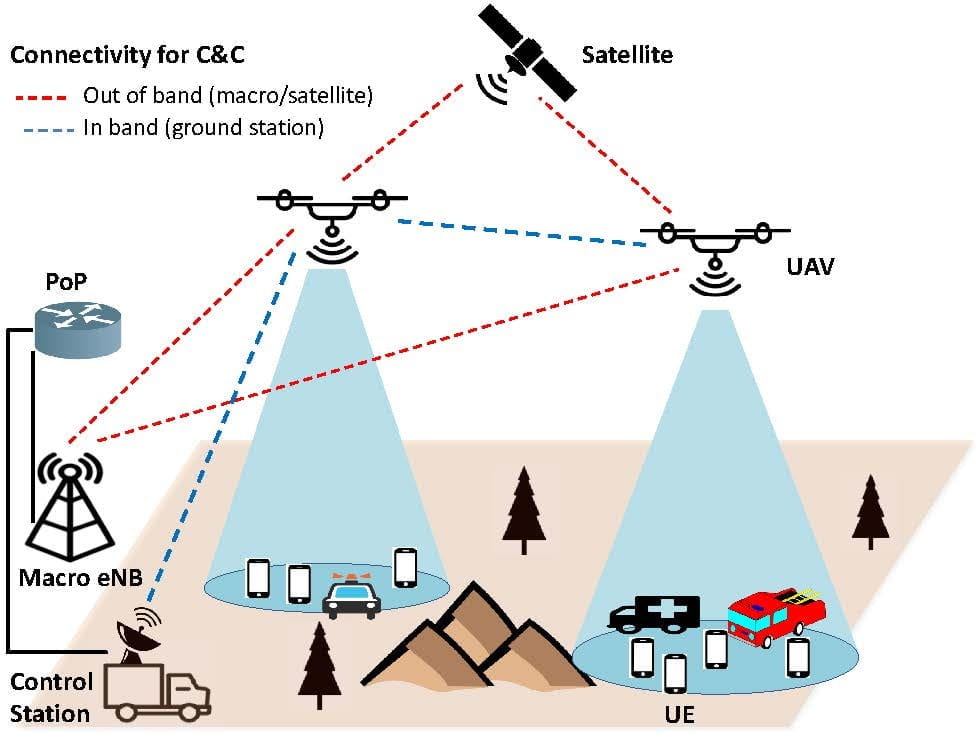
Our group is researching what we call Mobility Inverted Networks (MIN) which flip this mobility paradigm and is motivated by the rise in the interest of mobile aerial platforms in communicaton systems. This framework captures different types of mobile infrastructure, from highly dynamic unmanned aerial vehicles to satellites communication networks.
Some challenges/problems our group is addressing:
- Radio Environment Maps
Terrestrial networks are generally planned through time-/measurment-intensive drive testing. These provide a highly accurate picture of the wireless environment, but only for the given location. An alternative is to make use of stochastic models which are based on measurements and a statistical description of the environment. The models provide a one shot high-level description of the wireless envrionment, but fail to be prescriptive enough for base station placement. When the base station itself is mobile, as is the case with a UAV network, we can simulatneously measure and find the optimal access point location. Additionally, the UAVs mobility enables it to respond to dynamic conditions on the ground, such as client mobility. This leads to the question: What is the quickest, most accurate method for developing a radio environment map (REM)?
The primary challenge in developing this map is one of dimensionallity. Ideally, we would like to know the wireless channel between any point on the ground (2D) to any point in the airspace above (3D). It would simply be infeasible to measure all of these points, and impossible to do so anyway because we are restricted to measuring points on the ground which are currently occupied by users. Our approach is to leverage **computer vision** on board the UAV to simulataneously develop a physical map of the environment and intelligently plan a measurement trajectory. We then use deep learning to extrapolate the key measurement points to fill in the rest of the 5D REM.
- N. C. Matson, K. Sundaresan, “Online Radio Environment Map Creation via UAV Vision for Aerial Networks”, IEEE International Conference on Computer Communications (INFOCOM), May 2024.